9 DoF Box Detection
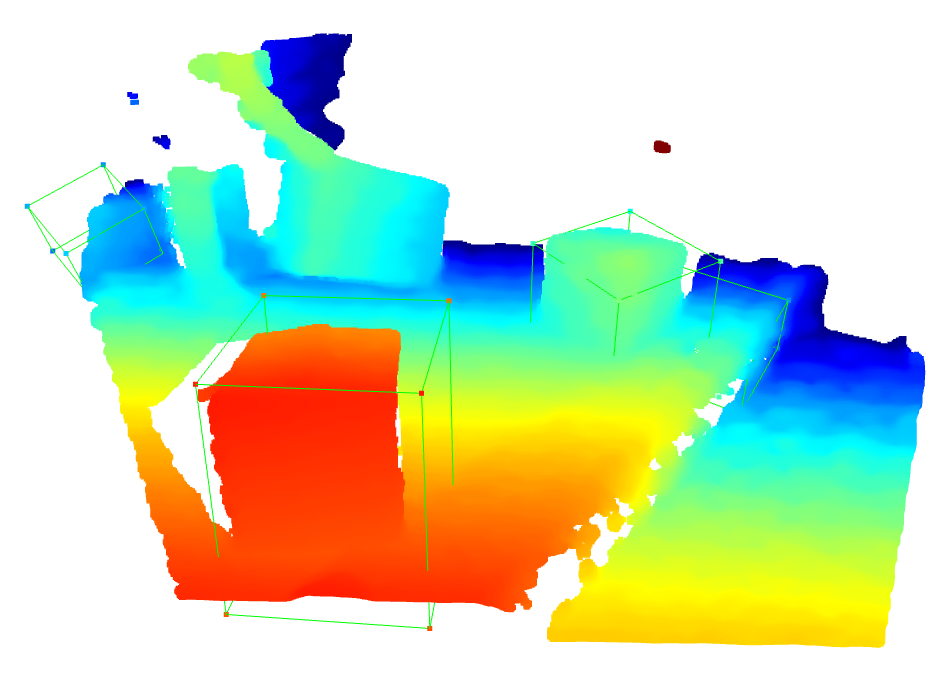
Working with Venkat Ramnan K and Dr. Chanho Kim, I contributed to a project developing a 9-Degrees-of-Freedom 3D object detector capable of predicting full box orientation—including pitch, roll, and yaw—from partial point clouds derived from RGB-D images. The model extends TR3D to support full 3-DoF rotation using a 12-D pose representation and a Chamfer-distance–based regression loss. I implemented the data loading pipeline, added data augmentation modules, and collected real-world test sequences to evaluate sim-to-real transfer. This work introduces a new synthetic 9-DoF box dataset built in NVIDIA Isaac Sim and demonstrates strong performance in both simulation and real settings.